

電動(dòng)伺服缸的介紹
瀏覽:2759 日期: 2017-07-12
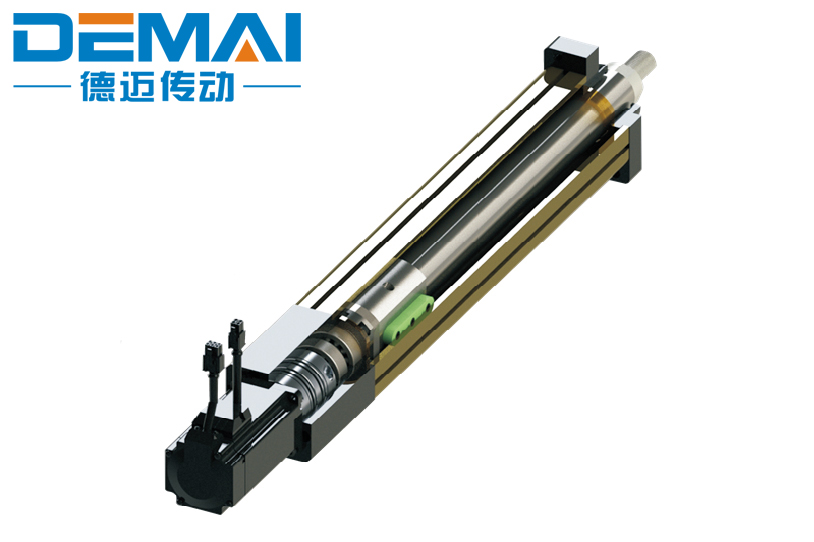
電動(dòng)伺服缸是將伺服電機(jī)與絲杠一體化設(shè)計(jì)的模塊化產(chǎn)品,將伺服電機(jī)的旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)換成直線運(yùn)動(dòng),同時(shí)將伺服電機(jī)最佳優(yōu)點(diǎn)-精確轉(zhuǎn)速控制,精確轉(zhuǎn)數(shù)控制,精確扭矩控制轉(zhuǎn)變成-精確速度控制,精確位置控制,精確推力控制;實(shí)現(xiàn)高精度直線運(yùn)動(dòng)系列的全新革命性產(chǎn)品。現(xiàn)已廣泛應(yīng)用在動(dòng)感座椅,模擬飛行器,模擬仿真,壓裝機(jī),食品機(jī)械,陶瓷機(jī)械,焊接機(jī)械,升降平臺(tái)等。
下面我們簡單介紹下各種電動(dòng)伺服缸系統(tǒng)特點(diǎn)。
一、交流電動(dòng)伺服缸系統(tǒng):
針對(duì)直流電動(dòng)缸的缺陷,如果將其做“里翻外”的處理,即把電驅(qū)繞組裝在定子、轉(zhuǎn)子為永磁部分,由轉(zhuǎn)子軸上的編碼器測(cè)出磁極位置,就構(gòu)成了永磁無刷電動(dòng)機(jī),同時(shí)隨著矢量控制方法的實(shí)用化,使交流伺服系統(tǒng)具有良好的伺服特性。其寬調(diào)速范圍、高穩(wěn)速精度、快速動(dòng)態(tài)響應(yīng)及四象限運(yùn)行等良好的技術(shù)性能,使其動(dòng)、靜態(tài)特性已完全可與直流伺服系統(tǒng)相媲美。同時(shí)可實(shí)現(xiàn)弱磁高速控制,拓寬了系統(tǒng)的調(diào)速范圍,適應(yīng)了高性能伺服驅(qū)動(dòng)的要求。
二、直流電動(dòng)伺服缸系統(tǒng)
直流電動(dòng)伺服缸引入了機(jī)械換向裝置。其成本高,故障多,維護(hù)困難,經(jīng)常因碳刷產(chǎn)生的火花而影響生產(chǎn),并對(duì)其他設(shè)備產(chǎn)生電磁干擾。同時(shí)機(jī)械換向器的換向能力,限制了電動(dòng)機(jī)的容量和速度。電動(dòng)機(jī)的電樞在轉(zhuǎn)子上,使得電動(dòng)機(jī)效率低,散熱差。為了減小電樞的漏感,轉(zhuǎn)子變得短粗,改善換向能力,影響了系統(tǒng)的動(dòng)態(tài)性能。
直流電動(dòng)伺服缸的工作原理是建立在電磁力定律基礎(chǔ)上。與電磁轉(zhuǎn)矩相關(guān)的是互相獨(dú)立的兩個(gè)變量主磁通與電樞電流,它們分別控制勵(lì)磁電流與電樞電流,可方便地進(jìn)行轉(zhuǎn)矩與轉(zhuǎn)速控制。另一方面從控制角度看,直流伺服的控制是一個(gè)單輸入單輸出的單變量控制系統(tǒng),經(jīng)典控制理論完全適用于這種系統(tǒng),因此,直流伺服系統(tǒng)控制簡單,調(diào)速性能優(yōu)異,在數(shù)控機(jī)床的進(jìn)給驅(qū)動(dòng)中曾占據(jù)著主導(dǎo)地位。
三、步進(jìn)電動(dòng)伺服缸系統(tǒng)的結(jié)構(gòu)與工作原理:
步進(jìn)伺服系統(tǒng)的結(jié)構(gòu)簡單,符合系統(tǒng)數(shù)字化發(fā)展需要,但精度差、能耗高、速度低,且其功率越大移動(dòng)速度越低。特別是步進(jìn)伺服易于失步,使其主要用于速度與精度要求不高的經(jīng)濟(jì)型數(shù)控機(jī)床及舊設(shè)備改造。
步進(jìn)伺服是一種用脈沖信號(hào)進(jìn)行控制,并將脈沖信號(hào)轉(zhuǎn)換成相應(yīng)的角位移的控制系統(tǒng)。其角位移與脈沖數(shù)成正比,轉(zhuǎn)速與脈沖頻率成正比,通過改變脈沖頻率可調(diào)節(jié)電動(dòng)機(jī)的轉(zhuǎn)速。如果停機(jī)后某些繞組仍保持通電狀態(tài),則系統(tǒng)還具有自鎖能力。步進(jìn)電動(dòng)機(jī)每轉(zhuǎn)一周都有固定的步數(shù),如500步、1000步、50000步等等,從理論上講其步距誤差不會(huì)累計(jì)。
從以上三點(diǎn)我們了解到各種伺服電動(dòng)缸系統(tǒng)的特點(diǎn),科技的發(fā)展,務(wù)必會(huì)促使國內(nèi)電動(dòng)缸發(fā)展的趨勢(shì),加快逐漸替代無桿氣缸等氣缸產(chǎn)品,提高設(shè)備上精度上的需求。

